Our Teams
-

Electrical Team
Team Lead: David Burke
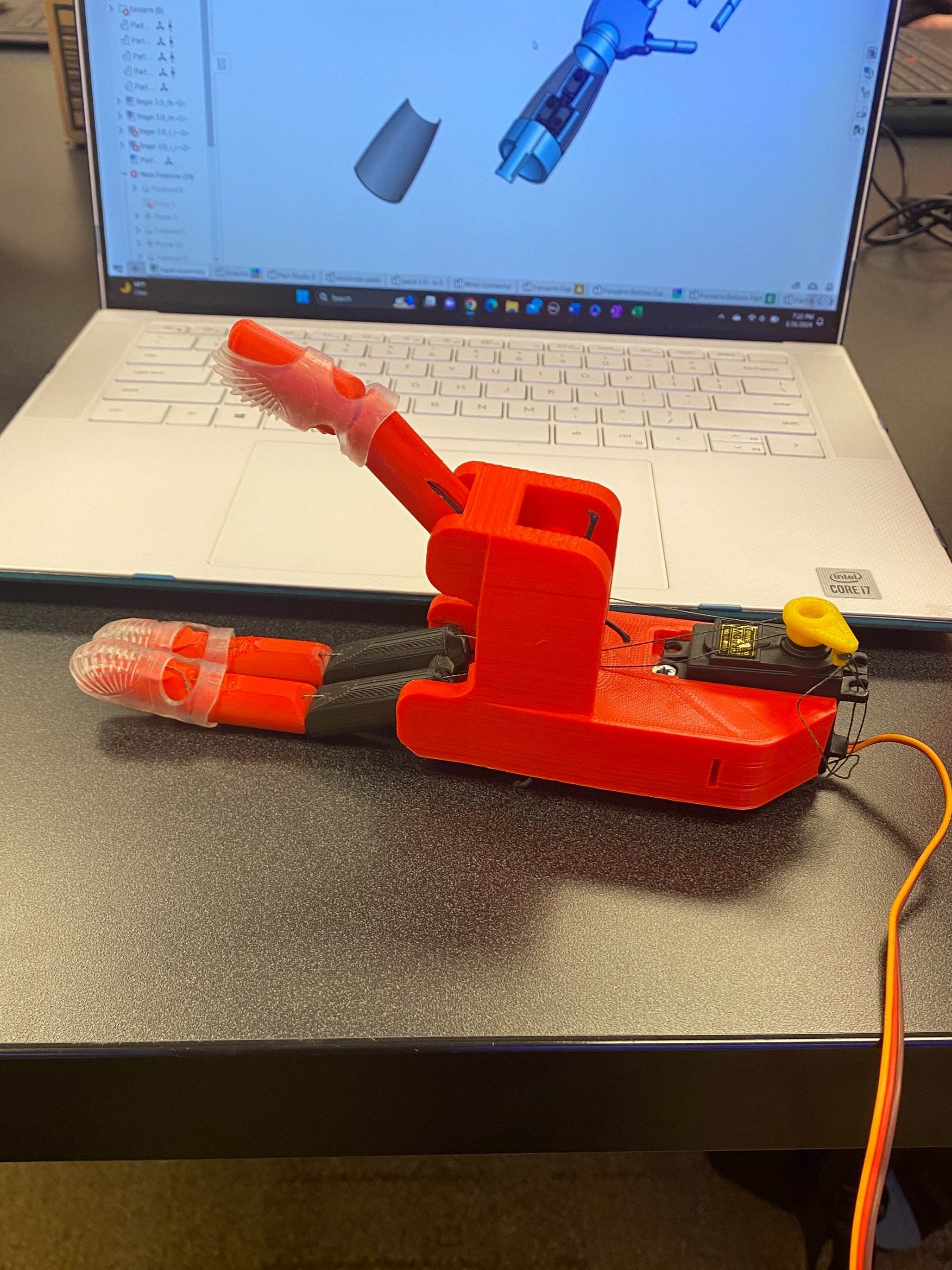
Overall Design Goal: The electrical team’s design goal is to configure and code the motors, sensors, and other electrical aspects of the 3D hand.
-

Mechanical Team
Team Lead: Ryan Page
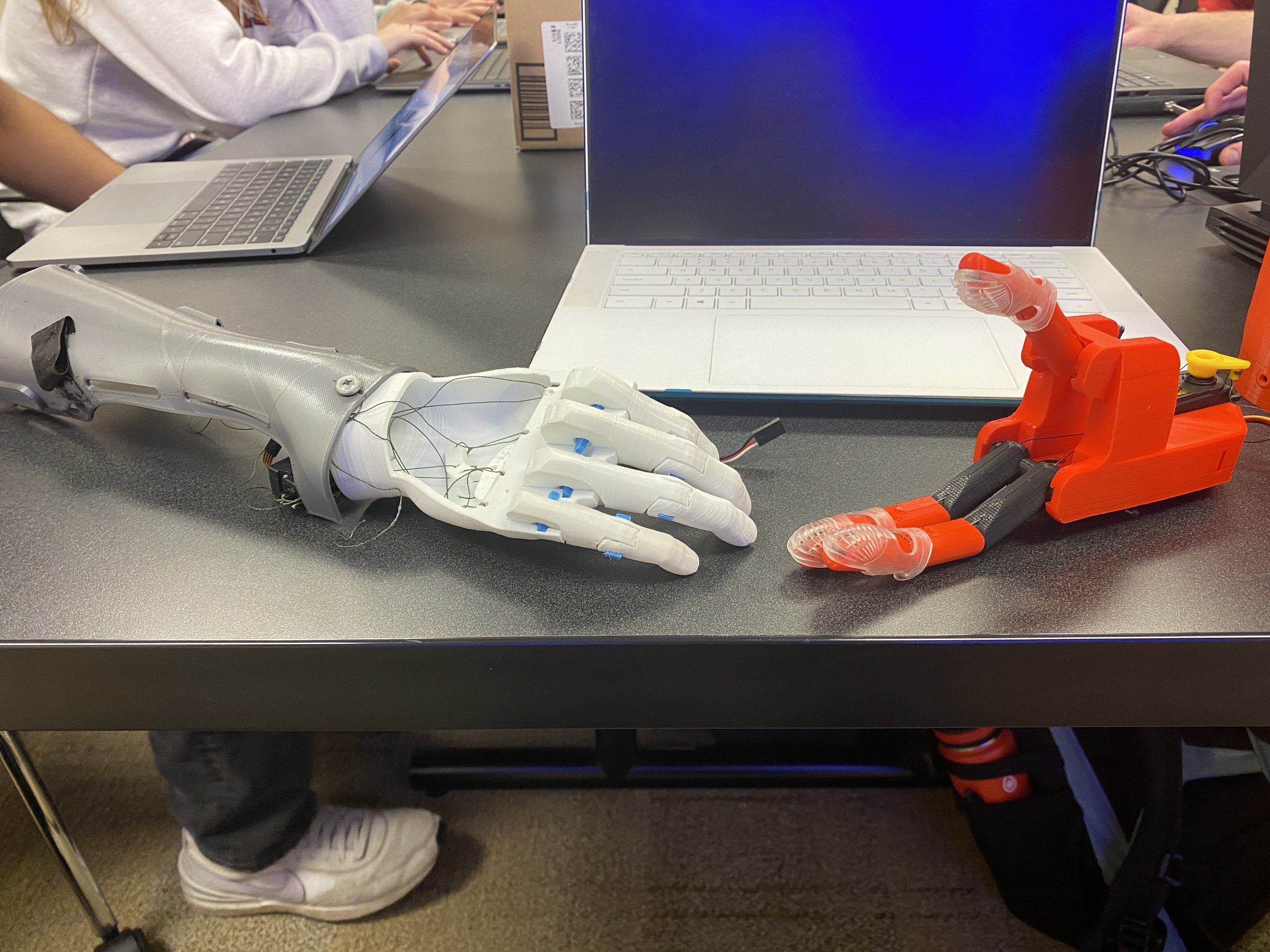
Overall Design Goal: The mechanical team’s design goal is to design and 3D print a fully functional hand that incorporates the electrical team’s motors and sensors.
-

Electromechanical Team Lead
Team Lead: Liam Kroeper
Overall Goal: The overall goal of the Electromechanical Team is to design a 3D-printed prosthetic hand that uses electrical components.